
As part of our research, our lab constructs observational platforms that are specifically designed to answer questions about the distribution, function and response of marine organisms, principally those that form structural habitat.
Minilanders
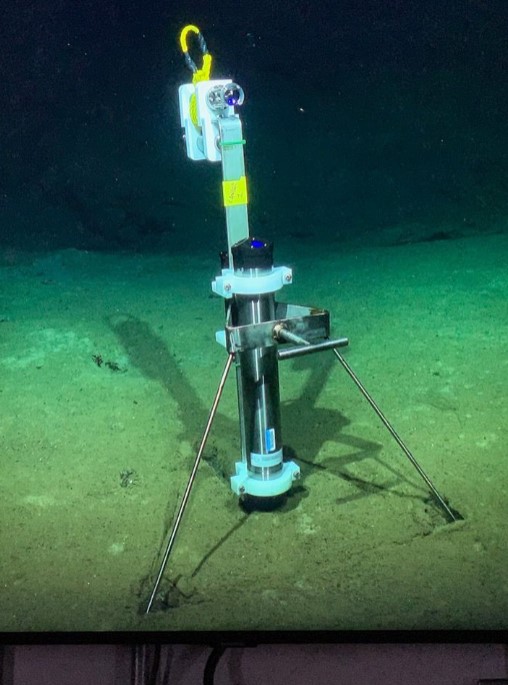
Minilanders are small landers (just over 1 meter tall) meant for deep deployments of up to 1 year. Due to their size, they are deployable by ROV (remote-operated vehicle) and don’t require any built-in floatation or drop-weight system like larger gear does. They can also be placed much closer to the reefs we study, which helps us collect more information. The small size of the minilanders does mean there’s a limited sensor payload; however, they can still collect a range of information on dissolved oxygen, currents, turbidity, conductivity, temperature, and depth. Two minilanders were recently recovered from the Gulf of Mexico. The landers are equipped with mild steel sacrificial anodes, which protect the rest of the lander from corrosion by being the first part that degrades.
Top: photograph of a minilander during a deployment
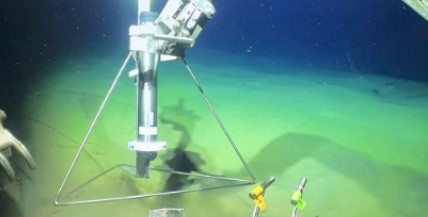
Bottom: photograph of a minilander being retrieved via an ROV (remote-operated vehicle)
Ceto
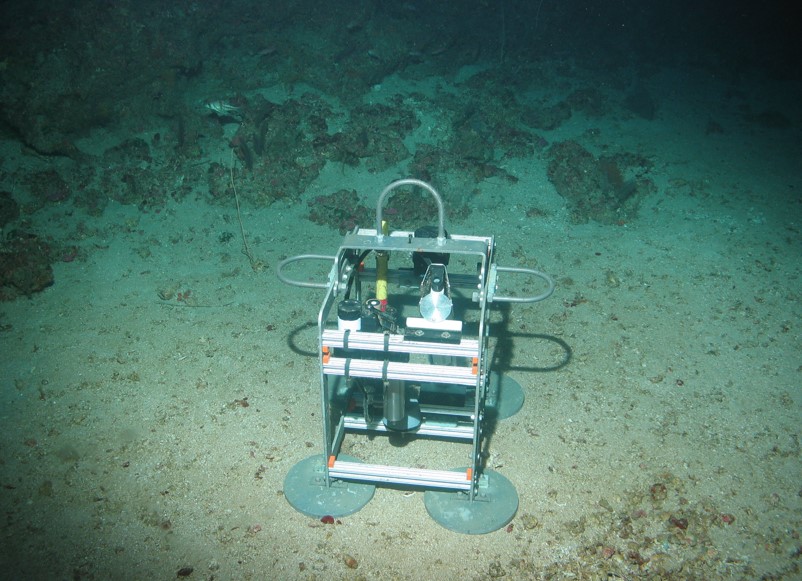

CETO landers are fairly small and must be placed on-site by a remote-operated vehicle since they do not have a flotation or drop-weight system. These landers are designed to spend an average of 3 months collecting a variety of environmental data in coral ecosystems such as temperature, salinity, dissolved oxygen, current qualities, and photosynthetically active radiation (the amount of solar radiation that’s usable to photosynthetic organisms). The lab has three CETO landers in total, but two are currently deployed at different mesophotic depths to examine the differences between the two environments.
Top: A CETO lander on the ocean floor
Bottom: Two CETO landers and an ROV alongside one of the lab’s grad students
ALBEX

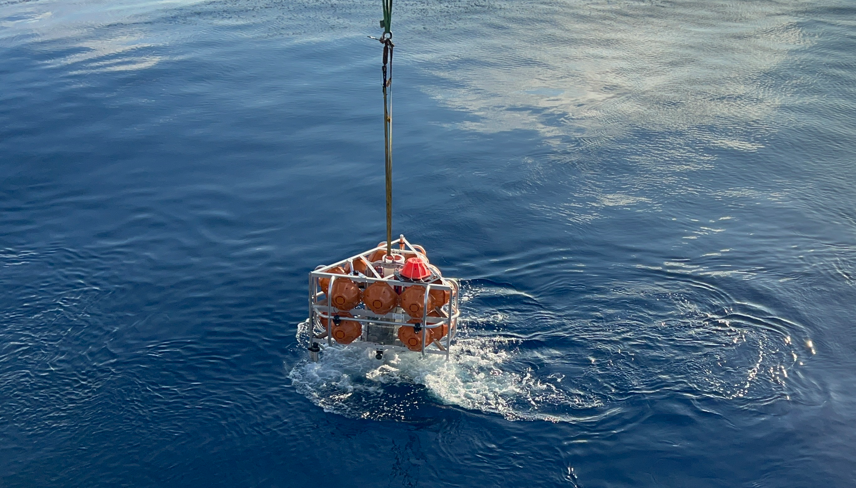
The ALBEX has a frame of around 7 feet tall that provides a platform for a larger suite of sensors. This lander includes many of the same sensors as the previous two, but also has space for larger systems such as sediment traps, cameras and hydrophones, particle samplers, and echosounders, allowing us to collect even more data. Since the ALBEX is much larger, its buoyancy and drop-weight system allow us to deploy without using an ROV. Instead, the lander floats down to the sea floor for deployment and back up to the surface for recovery. However, since it’s not as simple as placing the lander where it needs to be, deck operations for deployment are much more complex. So far, we have four completed landers that have been deployed a total of six times, and two more frames will be ready in Spring 2025.
Top: A fully assembled ALBEX ready for deployment
Bottom: An ALBEX lander being lowered into the water for deployment